The ifm O3D series of cameras and sensors provide parameters to change the frequency mode. What is a frequency mode and which settings to choose?
What means frequency?
The word frequency refers to the modulation frequency of the illumination. The measurement principle of O3D, O3M and O3X cameras uses a continuous modulation of the illumination. Principally it’s a square waveform.
The O3D provides three different “modulation frequencies” or “modulation channels” (both terms have same meaning): 28, 29 and 30 MHz. When using the single frequency mode, one of these frequencies or channels can be chosen. When using multiple devices close by, it is advisable to set each of the devices to different modulation frequencies. This way interferences can be minimized.
The principle is analogous to receiving different radio channels at different frequencies – in case of ToF cameras in the form of light.
What are frequency modes?
The standard frequency mode is “single frequency”. In this mode, the O3D uses only one modulation frequency for measurement. However, that way, the possible measurement range is only up to 5m. Every object at a distance of 6m is measured at a distance of 1m again. Why is that?
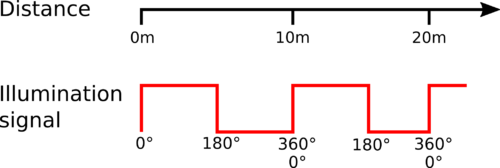
As mentioned, the measurement principle uses a continuous wave. A wave is periodical, with repeating values after each 360°. Therefor the measurement value is repeating. See below sketch.
For measurement of object distances, the distances shown in above figure need to be divided by 2, because of the way forth and back.
If you are interested in a more detailed explanation, see subheading The Ambiguity Problem for more details.
To be able to measure beyond 5m (10m light path), the O3D supports multiple-frequency modes. Internally the camera takes multiple images with two or even three different modulation frequencies and combines the data to one frame without ambiguities.
Here is a list of measurement ranges with no ambiguity:
Unambiguity range
Parameter string
single frequency
Up to 5m
under5m_[exposure_mode]
double frequency
Up to 30m
upto30m_[exposure_mode]
triple frequency
Beyond 30m
morethan30m_[exposure_mode]
The frequency mode can be set via custom software. Therefor a parameter string is specified in the form of [frequency-mode]_[exposure_mode]. See the right column of the table. The exposure modes are discussed in another post.
Whenever the O3D uses multiple frequencies for each frame, be aware of potential interferences with other devices.
The Ambiguity Problem
Example: Let’s assume a modulation frequency of 30MHz. Given the speed of light with c_0=299 792 458 m/s, we get a wave length \lambda_{mod}=\frac{c_0}{f_mod} = \frac{299 792 458 m/s}{30 000 000 Hz} \approx 10m
That means, that our light wave has a wave length of 10m. Beyond 10m it repeats. When measuring, the light wave needs to travel forth and back, thus the distance to objects without ambiguity is 5m.
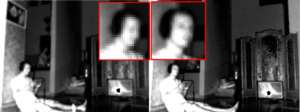
The O3D camera series of ifm electronic provides 23k of lateral resolution, 176×132 pixels. However, the actual imager has a 100k resolution, 352×264 pixels. Is it possible to use the native resolution? – Yes, it is. This article shows how to do it and what to be aware of.
Amplitude image at 23k (left) and 100k (right).
Why only 23k per default?
The 23k is the result of 2×2 binning of the original pixel matrix. Binning means that 2×2 pixels are averaged together to provide a single data value.
There are certainly many reasons, why ifm decided to reduce lateral resolution. Probably the main reason was to increase data quality. The more pixel are combined together, the less noise we get.
Here is a (not complete) list of potential benefits of a lower resolution:
reduced noise
more electrons collected per binned pixel, thus more sensitive to low signal
more robust against saturation
less data load on the interface/less pixels to compute
What are the side effects of 100k?
The side effects of increasing the lateral resolution may include the following issues:
increased noise
low signal pixels more likely to be invalid
more prone to saturation
increased effects of motion blur
out-of-focus is more likely to be perceived visually (the lens is sharp at 1m). This is because the effective “pixel” size is half the size in each lateral dimension compared to the binned version.
More data load on the interface
Switching to 100k
The resolution can be set via a hidden (but officially supported) parameter. 100k mode can be set for each application on the O3D respectively. Make sure there is already a valid application running on your device.
Using the official ifm3d tool
The ifm3d suite consists of C++ libraries and tools to run the O3D and O3X sensors. Download the source code here: https://github.com/ifm/ifm3d
Once followed the build and install instructions, you can use the ifm3d command to configure the sensor. The idea proposed here is the following:
download the sensor configuration as JSON string and save it to a text file
manipulate the configuration
Upload the configuration back to the sensor
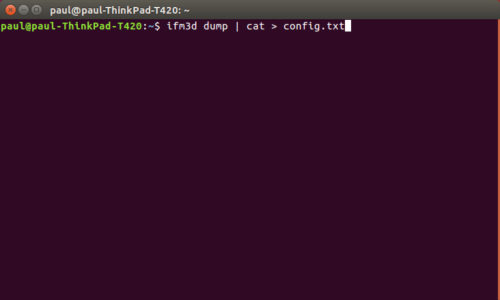
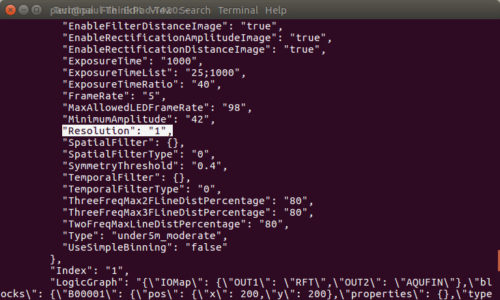
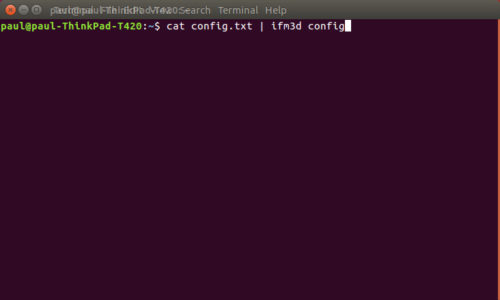
Step 1: To download the configuration from the device call ifm3d dump | cat > config.txtStep 2: Open the config.txt using a text editor of your choice. The resolution can be set for each application. Thus look for the right “Apps” node and the underlying “Resolution” parameter. Set it to 1 (0: 23k, 1: 100k) and save the file.Step 3: Use the ifm3d command to upload the updated configuration.
Using Web-Interface
The web-interface on the O3D can be accessed with the following URL:
http://192.168.0.69/api/rpc/v1/com.ifm.efector/
Paste that URL into your favorite internet browser and replace the IP address if needed.
The underlying communication is based on xml-rpc, a protocol that can be implemented in custom programs. A documentation of the O3D’s xml-rpc interface can be found on the vendor site, http://www.ifm.com. Search for O3D.
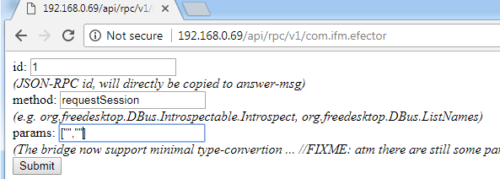
Step 1: Request session
To start communication with the camera, we need to get a session ID from the camera. Therefor we use the “requestSession” method and two parameters:
1) Password. Per default disabled
2) already existing session-ID to connect to
For sake of simplicity we assume no password protection. Thus both parameters are empty. However in the params mask we need to write all parameters as strings in quotation marks, thus we input two empty strings and click “Submit”.
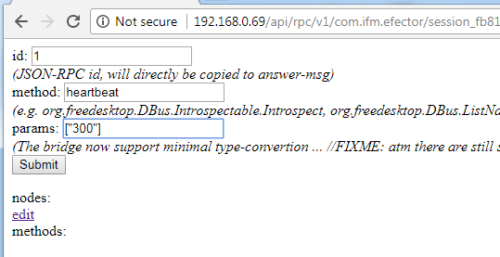
Step 2: Increase the heartbeat interval
Whenever a session is opened, the server expects a I-am-still-there-don’t-close-the-connection signal, also called heartbeat. The heartbeat can be invoked on the session domain. Click on the newly opened session or add the session string to the URL in the browser address field.
Since the heartbeat interval is only a couple seconds, we need to set it to the maximum value. For manual use it’s too short otherwise. The maximum value is 300 seconds.
Step 3: Set to edit mode and edit application
In the same domain call setOperatingMode to 1. This enables editing.
Afterwards we need to choose the application to edit. Use the application number in the Vision-Assistant as a reference. Indexing starts with 1. In this example we choose application no. 1.
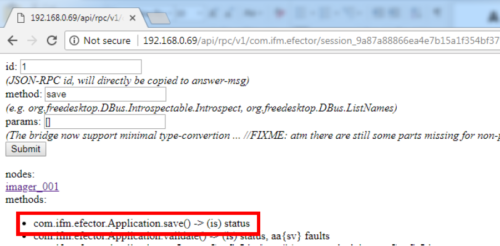
Step 4: Set the resolution
The resolution parameter can be found after going to the edit/application/imager_001 node, either by clicking on the hyperlinks or adding the sub/address to the URL. When calling the method “GetAllParameters”, the Resolution parameter appears:
In order to change the setting invoke the method “SetParameter” with the parameters [“Resolution”,”1″].
Step 5: Save and exit
The save method can be invoked in the application domain. Therefor shorten the URL by the imager_001 node and invoke the save method.
After saving the settings are applied. It is good practice to close session under the session parent node (“cancelSession” method).
Python Script
The below python script works with python 3 and is based on the very useful o3d package o3d3xx-python which is hosted on github.
You can invoke the script from your command shell:
>>python this_script.py -h
from builtins import *
import o3d3xx
importsysimportgetoptdef usage():
helptext ="switch_resolution.py [-i ] -a <app-index, 0: create new> -r <0: 20k, 1: 100k>";print(helptext)def main(argv):
ipaddress ="192.168.0.69";
app_index =0
res_index =0try:
opts, args =getopt.getopt(argv,"hi:a:r:")exceptgetopt.GetoptErroras err:
print(err)
usage()sys.exit(2)
have_res =False
have_app =Falsefor opt, arg in opts:
if opt =='-h':
usage()sys.exit()elif opt in("-i"):
ipaddress = arg
elif opt in("-r"):
res_index =int(arg)
have_res =Trueelif opt in("-a"):
app_index =int(arg)
have_app =Trueifnot have_app ornot have_res:
usage()sys.exit(2)# create device
device = o3d3xx.Device(ipaddress)# open a session and create an application for editing
session = device.requestSession()
session.startEdit()if app_index ==0: # we create a new application
app_index = session.edit.createApplication()
application = session.edit.editApplication(app_index)
application.setParameter("Name","PythonScript " + str(app_index))else:
application = session.edit.editApplication(app_index)
application.imagerConfig.setParameter("Resolution",str(res_index))
session.edit.device.setParameter("ActiveApplication",str(app_index))
application.save()
session.cancelSession()if __name__ =="__main__":
main(sys.argv[1:])